RCKolik'te Ahmet Kara'nın "kendi yazılımımızı kendimiz yapalım" önerisi üzerine ben çok istediğim bu işe alış-veriş yaparak giriş yapmaya karar verdim... Elimdeki PixHawk sistemini bozmadan farklı bir yapıda kendi yazılımızı yapmayı düşündüm...
AliExpress'den baya bir sipariş verdim. Tabi tedarik süresi uzun sürdü..
27 Kasım 2019 Çarşamba
15 Ekim 2019 Salı
Head Tracker
2 Servo ile 2 Eksen ucuna PAL Kamera taktım...
Arduino ve MPU6050 Gyro sensörü ile ilk denemeleri yaptım...
Kafamdaki V.Gözlüğü döndürünce kamera da döndü...
Öyle fazla ahım şahım birşey değil ama işe yaraması yeterli... Drone havada iken sağa sola bakmak herhalde iyi birşey olsa gerek...
 |
| 2 Eksen Servo ucuna taktığım PAL kamera (alttan)... |
Kafamdaki V.Gözlüğü döndürünce kamera da döndü...
Öyle fazla ahım şahım birşey değil ama işe yaraması yeterli... Drone havada iken sağa sola bakmak herhalde iyi birşey olsa gerek...
7 Ekim 2019 Pazartesi
OSD
Micro MinimOSD'yi gayet ucuza aldım...
Lehimlerden sadece RX,TX olan taraftaki 6 taneyi ve Video In/Out olan taraftaki 4 taneyi lehimlemek daha uygun oluyor gibi...
PC'den ayarlama için "minimosd-Extra Config Tool" kullandım (diğer MWOSD ücretli)...
PixHawk üzerinde Telem2'ye bağladım. 57600 baud ve MavLink1 olarak. SR2 parametrelerini de ayarlamam gerekti (bkz)...
 |
| Micro MinimOSD |
PC'den ayarlama için "minimosd-Extra Config Tool" kullandım (diğer MWOSD ücretli)...
PixHawk üzerinde Telem2'ye bağladım. 57600 baud ve MavLink1 olarak. SR2 parametrelerini de ayarlamam gerekti (bkz)...
18 Eylül 2019 Çarşamba
FPV
Eldeki 2.4 GHz ve 1.2 GHz gibi Video Verici'ler 2.4 GHz Kumanda ve 1.2 GHz GPS frekansları ile etkileşim yaptıklarından dolayı 5.8 GHz Video Vericisi kullanmam gerekti...
Diğer bir husus : Sahada kafaya FPV sistemini takmanın pratik olması gerekiyor... Bu sebepten dolayı V.Gözlük, V.Alıcısı ve pilin birlikte olması lazım...
Bu hususları taşıyan ve bana göre fiyatı en uygun olanı aldım...
Eachine gözlükte ön kısmın uzun olması bir problem çıkarmıyor çünkü çok hafif...
Ürünün 2 dezavantajı var :
2008 senesinde Model Uçak ile bir FPV denemesi yapmıştım. Okulun
çatısına düşmekten kıl payı kurtarmıştım... FPV deneyip de Drone'u
kaybedenler bile var... O yüzden acemi iken tedbirli olmak lazım...
O yüzden baştan V.Gözlük alnımda takılı iken Loiter'de bir süre sabit tutup sonra V.Gözlüğü gözüme takıp, kısa bir süre bakıp gözümden çıkarıp alnıma alarak bir deneme yaptım... Sistem düzgün çalıştı...
Bir problem : GPS eskiden 10 sn'de Fix olurken FPV sistemi ile 20 sn'de Fix oluyor... GPS'in yakınındaki Analog (PAL) Kamera'dan şüpheleniyorum [ ölçümlerim onu gösteriyor ]...
Diğer bir husus : Sahada kafaya FPV sistemini takmanın pratik olması gerekiyor... Bu sebepten dolayı V.Gözlük, V.Alıcısı ve pilin birlikte olması lazım...
Bu hususları taşıyan ve bana göre fiyatı en uygun olanı aldım...
 |
Eachine VR-007 Pro |
Ürünün 2 dezavantajı var :
- Benim gözümde yakını bulanık görme problemi var. O yüzden ekrandaki OSD yazılarını bulanık görüyorum...
- Çözünürlüğü biraz düşük ama gayet net...
O yüzden baştan V.Gözlük alnımda takılı iken Loiter'de bir süre sabit tutup sonra V.Gözlüğü gözüme takıp, kısa bir süre bakıp gözümden çıkarıp alnıma alarak bir deneme yaptım... Sistem düzgün çalıştı...
Bir problem : GPS eskiden 10 sn'de Fix olurken FPV sistemi ile 20 sn'de Fix oluyor... GPS'in yakınındaki Analog (PAL) Kamera'dan şüpheleniyorum [ ölçümlerim onu gösteriyor ]...
26 Ağustos 2019 Pazartesi
Battery FailSafe ve Uçuş Süresi Ölçümü
Battery FailSafe ayarı için 2 parametre mevcut:
BATT_FS_LOW_ACT değeri Battery FailSafe olduğu zaman ne yapacağı.(0:None, 1:Land, 2:RTL)...
BATT_LOW_VOLT değeri FailSafe vereceği, Power Module'den gelen Voltaj değeri... Bendeki Power Module yükte iken biraz düşüş yapıyor... O yüzden Loiter ile ölçerek bendeki voltajları tespit ettim... Uzun süre beklemek biraz zor oluyor... Loiter sonunda pilin bitmesi sırasında yavaşça alçalıyor yada hafif dengesizlik yapıyor. Burda FailSafe vereceği zaman kumanda ile oynamamak lazım. Çünkü o zaman eğrideki oynamalar 10 sn'lik tespit süresi içinde olursa o zaman FailSafe'e geçmiyor...
Turnigy 2200 mAh, 3S Lipo pil ile yaptığım ölçüm değerleri:
5:27:13 - 5:33:05 = 5dk52sn = 352sn... Loiter'de en son 9.45 Volt... Pil takılı değilken pilin son voltajı 11.10 V.
Sonra 750 m.'lik bir Auto denemesi yaptım... Onda BATT_FS_LOW_ACT,2 yaptım (RTL). Son RTL yapma süresi ve 10 sn daha ekleyip ayarladım... 330 sn kadar sürdü (FS vermedi)... Bataryada 0.14V kadar daha kaldı...
Şimdi 5 dk uçuş süresi az 10 dk uçşsun şeklinde bir düşünce oldu ama sonra 5 dk uçmanın bile ne kadar zorlayıcı olduğunu gördükten sonra 10 dk'ya uzatmak iyi bir fikir olmayacak dedim...
BATT_FS_LOW_ACT değeri Battery FailSafe olduğu zaman ne yapacağı.(0:None, 1:Land, 2:RTL)...
BATT_LOW_VOLT değeri FailSafe vereceği, Power Module'den gelen Voltaj değeri... Bendeki Power Module yükte iken biraz düşüş yapıyor... O yüzden Loiter ile ölçerek bendeki voltajları tespit ettim... Uzun süre beklemek biraz zor oluyor... Loiter sonunda pilin bitmesi sırasında yavaşça alçalıyor yada hafif dengesizlik yapıyor. Burda FailSafe vereceği zaman kumanda ile oynamamak lazım. Çünkü o zaman eğrideki oynamalar 10 sn'lik tespit süresi içinde olursa o zaman FailSafe'e geçmiyor...
 |
| Loiter ile full boşalma eğrisi... |
Turnigy 2200 mAh, 3S Lipo pil ile yaptığım ölçüm değerleri:
5:27:13 - 5:33:05 = 5dk52sn = 352sn... Loiter'de en son 9.45 Volt... Pil takılı değilken pilin son voltajı 11.10 V.
Sonra 750 m.'lik bir Auto denemesi yaptım... Onda BATT_FS_LOW_ACT,2 yaptım (RTL). Son RTL yapma süresi ve 10 sn daha ekleyip ayarladım... 330 sn kadar sürdü (FS vermedi)... Bataryada 0.14V kadar daha kaldı...
Şimdi 5 dk uçuş süresi az 10 dk uçşsun şeklinde bir düşünce oldu ama sonra 5 dk uçmanın bile ne kadar zorlayıcı olduğunu gördükten sonra 10 dk'ya uzatmak iyi bir fikir olmayacak dedim...
21 Ağustos 2019 Çarşamba
Sınırları zorlamaya başladım...
Bu arada birkaç ciddi deneme yaptım...
 Radio FailSafe'e ayarlamak çok işime yaradı...
Radio FailSafe'e ayarlamak çok işime yaradı...
Önce, Auto Mode'da 70 m. öteye, saha sonuna kadar gidip geldi...
Sonra, saha dışına çıktığında yükseklik farkı olan bir yere, üst yola git-gel denemesi yaptım...
Üst yoldaki ağaçlar ve elektrik direkleri çok yüksek gözüktü gözüme ve o yüzden 40 m. yükseklikte deneme yaptım. 40 m. çok aşırı yüksek oldu ve beni zorladı. Yukarı bakarken filan baya bir korktum... Ama sonuçta düzgün yaptı... Amacım zemindeki yükseklik farkı GPS Alt. değerini değiştiriyor mu onu anlamaktı ama bu denemede tam anlayamadım...
Sonraki denemede de zaman denemesi yaptım. Toplam 500 m.'lik bir uçuş gerçekleştirdim. Bunda da uçuş süresi fazla olduğu için bir endişe duydum çünkü ne kadar uzun sürerse o kadar aksilik çıkma ihtimali vardı... Onu da çok düzgün yaptı. 500 m.'yi 200 sn'de yaptı... 2200 mAh, 3S pil 0.94V harcamış...
Sonra uzağa gidiş-geliş planladım. Toplam 500 m.'lik yol. 40 m. yükseklik. 200 m. kadar direkt uzaklık... Bir problem olmadan gitti geldi... Yine 200 sn tuttu...
Üst yoldaki ağaçlar ve elektrik direkleri çok yüksek gözüktü gözüme ve o yüzden 40 m. yükseklikte deneme yaptım. 40 m. çok aşırı yüksek oldu ve beni zorladı. Yukarı bakarken filan baya bir korktum... Ama sonuçta düzgün yaptı... Amacım zemindeki yükseklik farkı GPS Alt. değerini değiştiriyor mu onu anlamaktı ama bu denemede tam anlayamadım...
 | |
| 40 m. yükselme korkuttu... |
 |
| Uzağa gidiş-geliş... |
15 Ağustos 2019 Perşembe
Auto Mode ile FailSafe
Mesafeler artınca Radio FailSafe'i aktif hale getirmek gerekti.
Radio FailSafe'i "Continue Auto Mission" şeklinde ayarladım...
Log'larda Auto Mode'da 30 m. ileri git-gel uçuşunda 2 kere FailSafe vermiş.
FailSafe'i iyice denemeye karar verdim.
Demiş : "If the failsafe clears (i.e. transmitter and receiver regain contact) the copter will remain in its current flight mode". Yani kumandayı açınca Auto'ya devam edecek. Sonra Mode değiştirirsem değişecek...
Sahada deneme şu şekilde oldu:
4 m yüksekte Auto Mission'da kumandayı kapatıp 3 adet WayPoint'i kumanda kapalı iken düzgün yaptığını ve bir oynama yapmadığını gözlemledim...
Önemli husus : FailSafe'de kumandayı kapatıp açmak gerekiyor. Bendeki FlySky FS-i6 kumandayı açarken Switch'ler UP pozisyonda olmazsa kumanda aktif hale geçmiyor...
"Warning. Place all switches in their up position and lower the throttle" diyor...
O yüzden Mode Switch'lerini Reverse yaparak UP pozisyonda istediğim gibi olmasını sağladım...

Kumanda Swtich pozisyonları şu şekilde ayarlı:
En sağdaki Mission Planner'deki CH7 ile Auto'ya ayarlı.
Sağdan 2.ci olan (3 Pos.) Stabilize/Alt-Hold/Loiter olarak ayarlı.
Radio FailSafe'i "Continue Auto Mission" şeklinde ayarladım...
Log'larda Auto Mode'da 30 m. ileri git-gel uçuşunda 2 kere FailSafe vermiş.
FailSafe'i iyice denemeye karar verdim.
Demiş : "If the failsafe clears (i.e. transmitter and receiver regain contact) the copter will remain in its current flight mode". Yani kumandayı açınca Auto'ya devam edecek. Sonra Mode değiştirirsem değişecek...
Sahada deneme şu şekilde oldu:
4 m yüksekte Auto Mission'da kumandayı kapatıp 3 adet WayPoint'i kumanda kapalı iken düzgün yaptığını ve bir oynama yapmadığını gözlemledim...
 |
| 30 ile 35 arasında kumanda kapalı (FailSafe)... |
"Warning. Place all switches in their up position and lower the throttle" diyor...
O yüzden Mode Switch'lerini Reverse yaparak UP pozisyonda istediğim gibi olmasını sağladım...

Kumanda Swtich pozisyonları şu şekilde ayarlı:
En sağdaki Mission Planner'deki CH7 ile Auto'ya ayarlı.
Sağdan 2.ci olan (3 Pos.) Stabilize/Alt-Hold/Loiter olarak ayarlı.
16 Temmuz 2019 Salı
"Battery 1 is low" hatası...
"Battery 1 is low" ve
"PreArm: Battery failsafe"
hataları hakkında :
Ara vermeden önce (30 Mart civarında) bu hatayı vermişti. Ondan sonra bazen 2.ci Arm sırasında Battery Error verip Alarm veriyor ve kilitleniyordu... Bu böyle sürüp gitti...
Aklıma son çare olarak eski Log'lara bakıp hatanın ne zaman başladığına bakıp problemi tespit etmek geldi.
Log'ların Param'larını çıkarıp kontrol ettim :
Hata vermezken : BATT_LOW_VOLT, 6
Hata verirken : BATT_LOW_VOLT, 10.5
Bunu anladım.
Aynı zamanda ucuz bir Power Module (PM) bulmuştum.
PM'yi değiştirdim... Eskisi Battery Monitor'da 5.x V gösteriyordu. Yenisi 12.09V civarında gösterdi ve motorlar çalışmazken 0.2A iken, çalışırken akım 2A filan oldu... 3DR...
Şimdilik Battery Error vermedi...
"PreArm: Battery failsafe"
hataları hakkında :
Ara vermeden önce (30 Mart civarında) bu hatayı vermişti. Ondan sonra bazen 2.ci Arm sırasında Battery Error verip Alarm veriyor ve kilitleniyordu... Bu böyle sürüp gitti...
Aklıma son çare olarak eski Log'lara bakıp hatanın ne zaman başladığına bakıp problemi tespit etmek geldi.
Log'ların Param'larını çıkarıp kontrol ettim :
Hata vermezken : BATT_LOW_VOLT, 6
Hata verirken : BATT_LOW_VOLT, 10.5
Bunu anladım.
Aynı zamanda ucuz bir Power Module (PM) bulmuştum.
PM'yi değiştirdim... Eskisi Battery Monitor'da 5.x V gösteriyordu. Yenisi 12.09V civarında gösterdi ve motorlar çalışmazken 0.2A iken, çalışırken akım 2A filan oldu... 3DR...
Şimdilik Battery Error vermedi...
19 Nisan 2019 Cuma
20 Mart 2019 Çarşamba
ArduCopter (PixHawk) Source Code'unu derleme...
2 farklı derleme yöntemi var...
İlk etapta GitHub'dan indirmek için:
Make ile derleme:
Önce şu adresten Toolchain'i (Latest) indirip C:\'ye kuruyoruz...
Building for Pixhawk on Windows with Make
adresinde yazanları yapıp Make ile derleyebiliyoruz...
Örneğin:
c:\pixhawk_toolchain\toolchain\msys\1.0\px4_console.bat
cd ../ardupilot/arducopter
make px4-v2
(En sonda çıkan PX4Firmware ve PX4Nuttx hash mesajlarını dikkate almayın. px4 dosyasının olması başarılı olduğunu gösterir)...
ChibiOS olanları Make derleyemiyor. Waf kullanmak gerekiyor...
Waf ile derleme:
Önce http://ardupilot.org/dev/docs/building-setup-windows-cygwin.html deki gibi kuruyoruz...
Cygwin'i çalıştırıp "cd /cygdrive/c/ardupilot" yazıyoruz...
https://discuss.ardupilot.org/t/build-arducopter-3-6-fails/33296/3
adresinde yazanları yapıp Waf ile derleyebiliyoruz...
Önemli nokta: Web sayfasında dediği gibi. Şunları yazmak gerekiyor :
./waf distclean
git submodule deinit -f .
git clean -f -x -d
git pull
git submodule update --init --recursive
Sonra "c:\ardupilot\build.md" de yazanları uyguluyoruz...
Örneğin:
./waf configure --board fmuv3
./waf copter
- Make ile derleme...
- Waf ile derleme...
İlk etapta GitHub'dan indirmek için:
Önce Windows'a Git'i ve TortoiseGit'i kuruyoruz...
GitHub'daki ArduPilot ekranındaki "Clone or Download" düğmesinde çıkan "https://github.com/ArduPilot/ardupilot.git" adresini Copy yapıyoruz..
Windows'un C:\ klasörüne geçiyoruz...
Mouse'u sağ tıklayıp "Git Clone" yapıyoruz...
Directory olarak "C:\ArduPilot" yazıyoruz...
Branch olarak : "Copter-3.6" yada GitHub sayfasındaki Branch kımından istediğiniz bir Branch'ı Git ekranında belirtiyoruz...
Recursive'i seçiyoruz...
İndirmeyi başlatıyoruz...
Make ile derleme:
Önce şu adresten Toolchain'i (Latest) indirip C:\'ye kuruyoruz...
Building for Pixhawk on Windows with Make
adresinde yazanları yapıp Make ile derleyebiliyoruz...
Örneğin:
c:\pixhawk_toolchain\toolchain\msys\1.0\px4_console.bat
cd ../ardupilot/arducopter
make px4-v2
(En sonda çıkan PX4Firmware ve PX4Nuttx hash mesajlarını dikkate almayın. px4 dosyasının olması başarılı olduğunu gösterir)...
ChibiOS olanları Make derleyemiyor. Waf kullanmak gerekiyor...
Waf ile derleme:
Önce http://ardupilot.org/dev/docs/building-setup-windows-cygwin.html deki gibi kuruyoruz...
Cygwin'i çalıştırıp "cd /cygdrive/c/ardupilot" yazıyoruz...
https://discuss.ardupilot.org/t/build-arducopter-3-6-fails/33296/3
adresinde yazanları yapıp Waf ile derleyebiliyoruz...
Önemli nokta: Web sayfasında dediği gibi. Şunları yazmak gerekiyor :
./waf distclean
git submodule deinit -f .
git clean -f -x -d
git pull
git submodule update --init --recursive
Sonra "c:\ardupilot\build.md" de yazanları uyguluyoruz...
Örneğin:
./waf configure --board fmuv3
./waf copter
14 Mart 2019 Perşembe
"Flight Mode Change Failed" hatası...
Auto Mode ile denemeler yaparken Görev Listesi'ni değiştirdikten sonra Auto Mode'e geçmedi ve "flight mode change failed" hatası vermeye başladı... Çok uğraştım ama bir türlü çözemedim...
Sonra:
ESP8266 kablosuz Telemetri ve Cep Telefonunda Tower uygulaması ile baya bir aşama kaydettim...
Tower ile bir süre bekledikten sonra ekrandaki ALT değeri 0'dan 777'lere çıkıyor... O zaman düzgün Loiter yapıyor... [ Apartmanların arasında 10 dk.da 777 olurken, Futbol Sahasında hemen 777 oluyor... ]
PC'den baktım... HUD ekranındaki EKF kırmızı iken hata veriyor, beyaza dönünce düzgün yapıyor...
[ Tower'de EKF hep yeşil... ]
ArduCopter 3.6.7'ye (ChibiOS) geçmiştim... Ama sahada Alt-Hold ve Loiter'de inişlerde hızlı indi ve zıplama yaptı...
PILOT_VELZ_MAX ArduCopter 3.5.7'de var ama 3.6.7'de yok...
Onun yerine :
PILOT_SPEED_UP, 125
PILOT_SPEED_DN, 100
olarak ayarladım...
Alt-Hold denemesinde iniş düzgün oldu...
Loiter denemesinde de kalkış ve iniş düzgün oldu...
Sonra:
Tower ile bir süre bekledikten sonra ekrandaki ALT değeri 0'dan 777'lere çıkıyor... O zaman düzgün Loiter yapıyor... [ Apartmanların arasında 10 dk.da 777 olurken, Futbol Sahasında hemen 777 oluyor... ]
PC'den baktım... HUD ekranındaki EKF kırmızı iken hata veriyor, beyaza dönünce düzgün yapıyor...
[ Tower'de EKF hep yeşil... ]
ArduCopter 3.6.7'ye (ChibiOS) geçmiştim... Ama sahada Alt-Hold ve Loiter'de inişlerde hızlı indi ve zıplama yaptı...
PILOT_VELZ_MAX ArduCopter 3.5.7'de var ama 3.6.7'de yok...
Onun yerine :
PILOT_SPEED_UP, 125
PILOT_SPEED_DN, 100
olarak ayarladım...
Loiter denemesinde de kalkış ve iniş düzgün oldu...
25 Şubat 2019 Pazartesi
2019 Hedeflerim :

Bu seneki hedeflerim :
- Geçen sene kaldığım noktaya kadar olanları basitçe denemek... [ Yapıldı. ]
- Kumanda mesafesi içinde denemeler yapmak... [ Yapıldı. ]
- SHGM'nin limitlerine kadar (120 m. yükseklik, 500 m yatay) uçurup yeterli güveni sağlamak... [ Yarı mesafe yapıldı. FailSafe işe yarıyor. Aşamalar şeklinde yapınca, bir sonraki denemede korku ve endişe azalıyor. ]
- Birkaç Grid (Ortofoto, Izgara) şeklinde yerin resmini çekmek... [ Yapmadım (Compact Kamera takma sistemi yapmak istemedim). ]
- Birkaç FPV denemesi... [ Birkaç deneme yapıldı. Geliştirmek istedim. ]
- Model Uçağın otonom uçuşunun basitten denenmesi... [ Yapmadım (Uçağa el atmak istemedim). ]
21 Şubat 2019 Perşembe
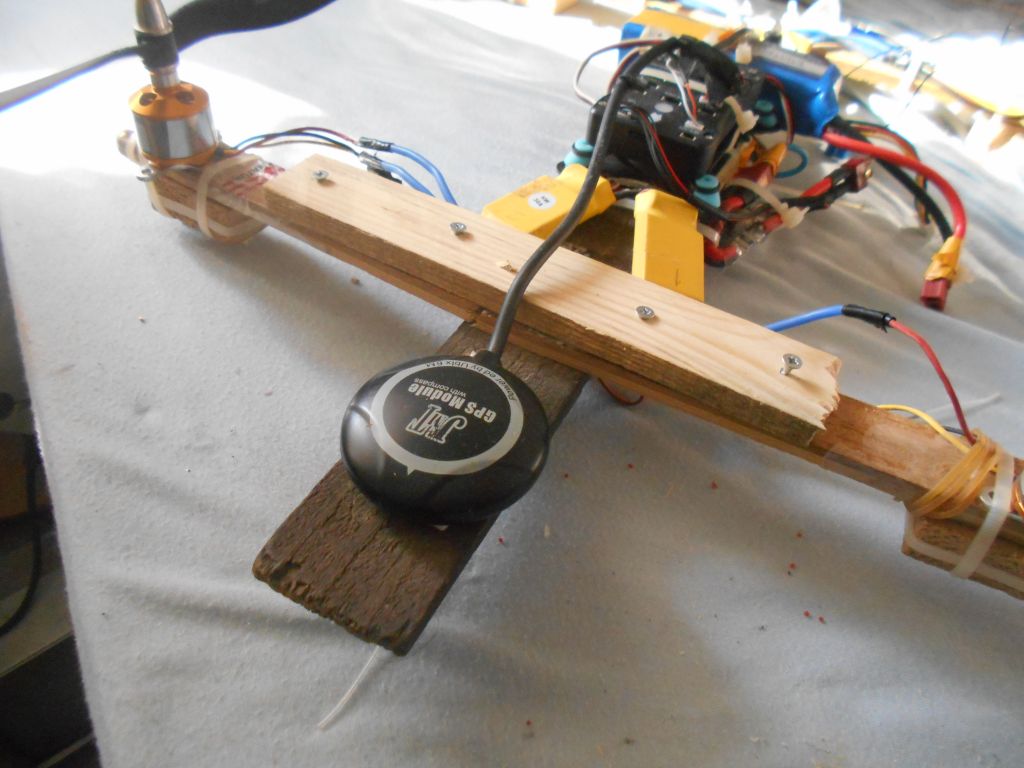
Büyük Kırım...
Geçen sene bu zamanlarda kırım olmuş. O yüzden dikkatli olayım dedim ama nafile... Ben ne yapsam da kırım olacak...
Önce yeni kumanda ile denedim... Arm yapınca dönmedi... AltHold modunda PID bozukluğu şeklinde osilasyon yapıp sapıtma oldu... Düştükten sonra 1 pervane kırıldı...
Sonra eski kumanda ile (eski ayarlar ile) denedim. Onda AltHold düzgün olsa da ben yanlış mode'a basınca 10 m yukarı fırlayıp yere serbest düşüş yaptı... 4 kalem ayak da kırıldı. Daha kötüsü 1 tahta kol da kırıldı...
Tamirat:
Kırılan kola atel yapıp kaynattım :)
Gerekli ince vidaları ve tahtaları yakındaki sanayi sitesinden temin ettim...
Yeni kumanda da RC Calibration ve ESC Calibration yaptıktan sonra düzgün çalıştı...
Önce yeni kumanda ile denedim... Arm yapınca dönmedi... AltHold modunda PID bozukluğu şeklinde osilasyon yapıp sapıtma oldu... Düştükten sonra 1 pervane kırıldı...
Sonra eski kumanda ile (eski ayarlar ile) denedim. Onda AltHold düzgün olsa da ben yanlış mode'a basınca 10 m yukarı fırlayıp yere serbest düşüş yaptı... 4 kalem ayak da kırıldı. Daha kötüsü 1 tahta kol da kırıldı...
 |
| Bir tahta kol kırıldı... |
Kırılan kola atel yapıp kaynattım :)
Gerekli ince vidaları ve tahtaları yakındaki sanayi sitesinden temin ettim...
 |
| Kırılan kola atel... |
13 Şubat 2019 Çarşamba
Bisiklet ile Drone kutusunun taşınması...
Geçtiğimiz hafta havalar çok iyi geçince ben de Quad'ı kutusundan çıkarıp ayarlamalara başladım...
Eskiden haftada 1-2 kez 1 km ötedeki Futbol Sahası'na gidip geliyordum... Yorulduğum için tekrar gidemiyordum... Bisiklet ile bir denedim. Günde 2 kere gidip-gelmek mümkün gibi geldi... O yüzden bisiklet ile drone taşıma sistemini düşünmeye başladım...
Eskiden Model Uçak ile uğraşırken Plastik Tabure (Plastik Oturak) sistemi gayet başarılı olmuştu...
Eskiden haftada 1-2 kez 1 km ötedeki Futbol Sahası'na gidip geliyordum... Yorulduğum için tekrar gidemiyordum... Bisiklet ile bir denedim. Günde 2 kere gidip-gelmek mümkün gibi geldi... O yüzden bisiklet ile drone taşıma sistemini düşünmeye başladım...
Eskiden Model Uçak ile uğraşırken Plastik Tabure (Plastik Oturak) sistemi gayet başarılı olmuştu...
 |
| Model Uçak 2008 Bu seneki yöntemim kutuyu bisikletin arkasına yanlamasına koyma olsun dedim... Önce geniş bir plaka monte ettim... |
 |
| Geniş Plaka... |
 |
Lastikler ile kutuyu tutturdum...
|
FlySky FS-İ6 Kumanda Aldım...
1 ay kadar önce FlySky FS-İ6 Kumanda Aldım...
Eski kumanda alıcısının anteninin uzun olması (aşağı sarkıtınca kamera görüntüsüne giriyor) ve 3 Pos Switch olmaması problem oluyordu... Ben de 2.4 GHz, 6 Kanal kumanda almaya karar vermiştim... Para biriktirip uygun fiyata alabildim...

Kumanda Swtich pozisyonlarını şu şekilde ayarladım:
En sağdaki CH7 ile Auto'ya ayarlı.
Sağdan 2.ci olan (3 Pos.) Stabilize/Alt-Hold/Loiter olarak ayarlı.
Eski kumanda alıcısının anteninin uzun olması (aşağı sarkıtınca kamera görüntüsüne giriyor) ve 3 Pos Switch olmaması problem oluyordu... Ben de 2.4 GHz, 6 Kanal kumanda almaya karar vermiştim... Para biriktirip uygun fiyata alabildim...

Kumanda Swtich pozisyonlarını şu şekilde ayarladım:
En sağdaki CH7 ile Auto'ya ayarlı.
Sağdan 2.ci olan (3 Pos.) Stabilize/Alt-Hold/Loiter olarak ayarlı.
25 Ocak 2019 Cuma
SHGM'den Pilotluk İzni...
iha.shgm.gov.tr'den Pilotluk Lisans'ı (izni) alamamıştım geçen sene... Adli Sicil Kaydımdaki problemleri Adli Sicil Kurumuna dilekçe yazarak sildirdim... Tekrar SHGM'den izin almak için bir engel kalmadı diyerek sitesine girdim ama karşıma iha pilotluk sınavı düğmesi çıktı... Talimatnameyi (PDF) 2-3 kere okudum ve 1 ay kadar sonra dedim bir deneyeyim bakalım nasıl oluyor sınav...
IHA sınavı Win7'de Chrome ile çalıştı. 20 soru var. Doğru Yanlış şeklinde. Çok kolay olduğu için akıp gidiyor... Yanlış basınca da 2 kere basmayı bekliyor :))) (yada bug var). Ben öylesine girdim 2 soru yanlış oldu (kafam karıştı). %90 aldım... 1 gün sonra tekrar girebiliyorsun...
15 dk sonra email geldi. Diyor ki:"IHA - 0 - Sportif / Amatör lisans tipli Pilot Kaydınız onaylanmıştır."
Böylece artık kendimi daha güvende hissedebilirim...
Kaydol:
Yorumlar (Atom)